RSSF(Real Scenes with Spike and Flow)
解决的困难与挑战
- 合成数据与真实场景的差距:传统合成数据(如SCFlow使用的图形模型数据)存在纹理不真实、光照简化、运动模式单一等问题,导致模型在真实场景中泛化能力差。RSSF通过基于真实高分辨率数据集(Slow Flow)模拟脉冲流,显著缩小了这一差距。
- 脉冲流的时间连续性建模:脉冲相机输出的是连续二进制脉冲流,单个脉冲仅反映积分结果而非瞬时状态,传统方法难以提取时空关联特征。RSSF通过多时间步长光流真值(dt=20,40,60)支持连续运动建模,解决了时间信息利用不足的问题。
- 真实数据标注难题:脉冲相机的真实数据难以直接标注光流。RSSF通过模拟生成脉冲流与光流真值的严格对应关系,绕过了真实数据标注的瓶颈。
数据集基础
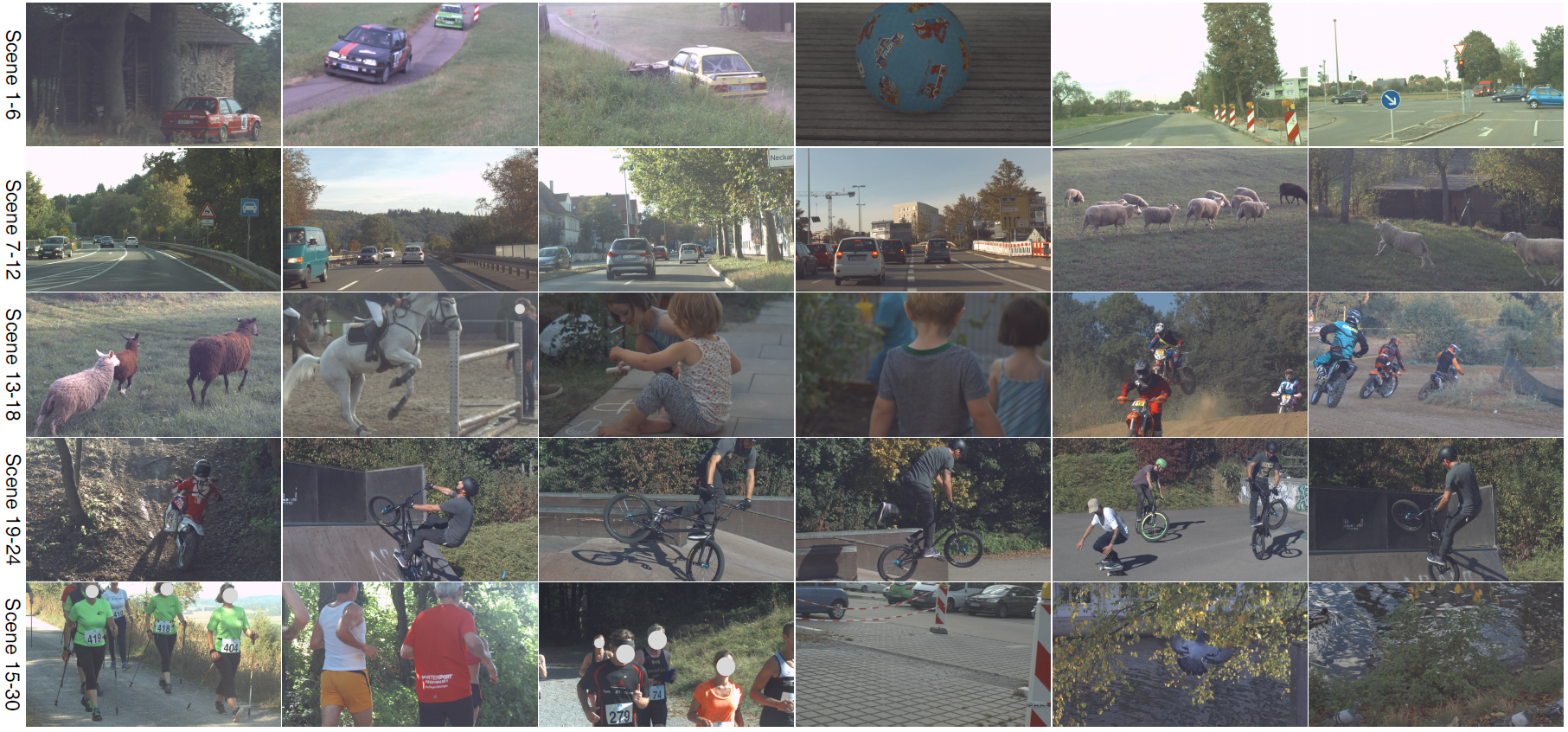
- 数据基础:基于 Slow Flow 数据集,含 41 个真实世界场景,支持多尺度光流估计
- 时间分辨率:帧间插值 20 步
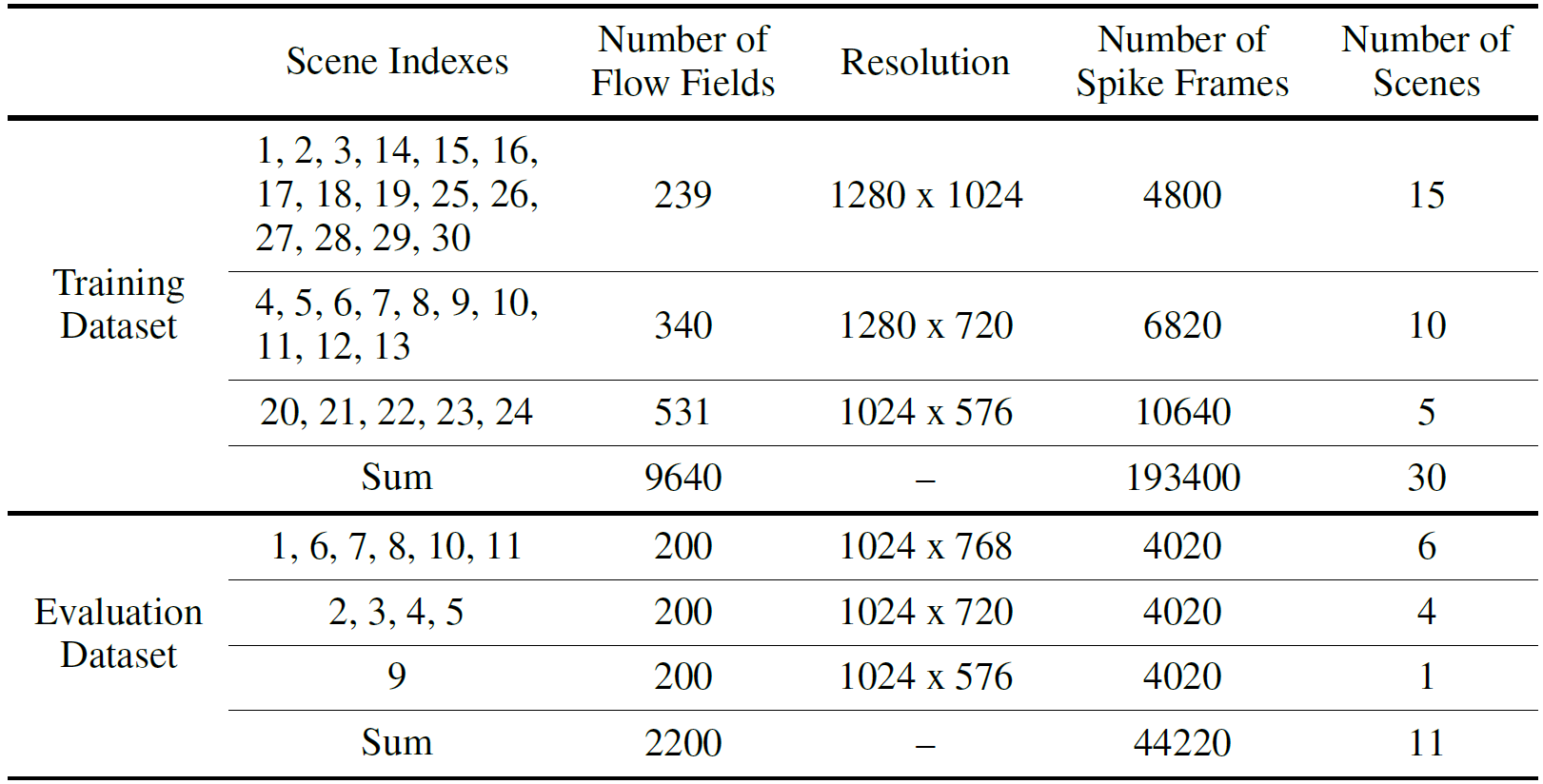
- 数据划分:
- 训练集:30 个场景,不同分辨率与脉冲帧数,共 9.64k+ 光流场,193k+ 脉冲帧
- 测试集:11 个场景,每场景前 200 个光流场,共 2.2k 光流场,44.22k 脉冲帧
数据集结构格式与标签定义
- 输入数据(脉冲流):
- 格式:H×W×T 的三维二进制张量(T为时间步长)。
- 存储方式:可能以dat格式存储
- 标签(光流真值):
- 格式:H×W×2 的浮点张量,每个像素包含水平位移 u 和垂直位移 v。
- 时间跨度:每个样本对应 dt=20,40,60 三种时间间隔的光流场。
- 生成方式:通过GMA网络从高分辨率图像序列中估计光流,并通过运动模拟确保与脉冲流的严格对齐。
-
RSSF 数据集目录结构:
RSSF ├── imgs └── spike