PKU-Vidar-DVS
用途:为脉冲相机提供多模态异步目标检测数据集,用于高速物体检测、低光环境感知和多模态融合算法验证。
场景类别:包含高速运动、低光照条件、复杂背景等多样化场景,覆盖室内和室外环境。
数据格式:
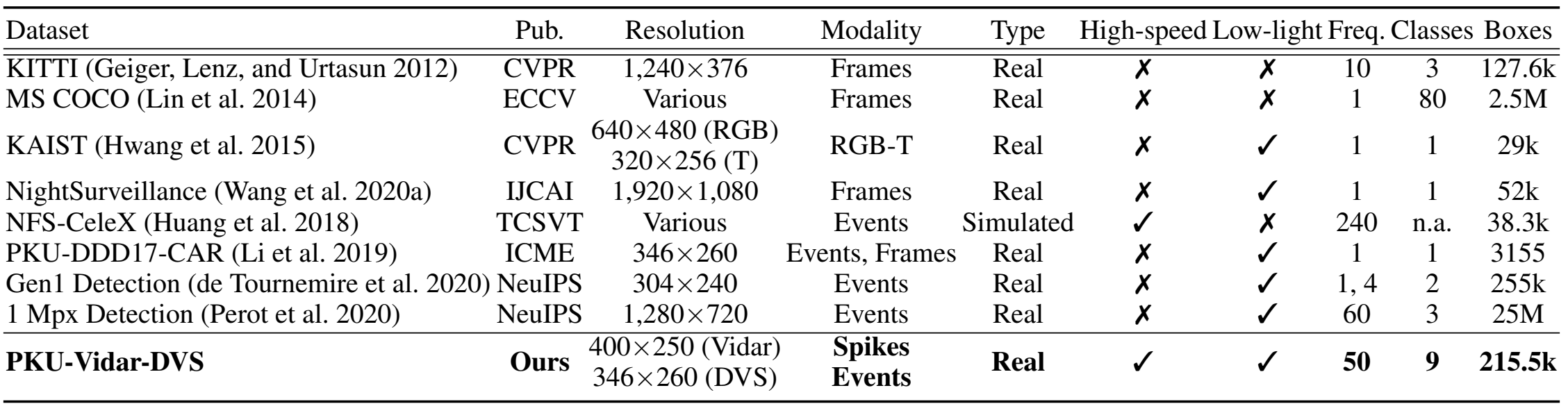
- Vidar(类中央凹视觉): 尖峰流(Spikes),400×250分辨率,20,000Hz采样率
- DVS(类周边视觉): 异步事件流(Events),每秒1200万事件,微秒级时间分辨率
数据规模:490段序列(每段约5秒),50Hz标注频率,总标注框数达215.5k,覆盖9类物体。
数据集核心特点
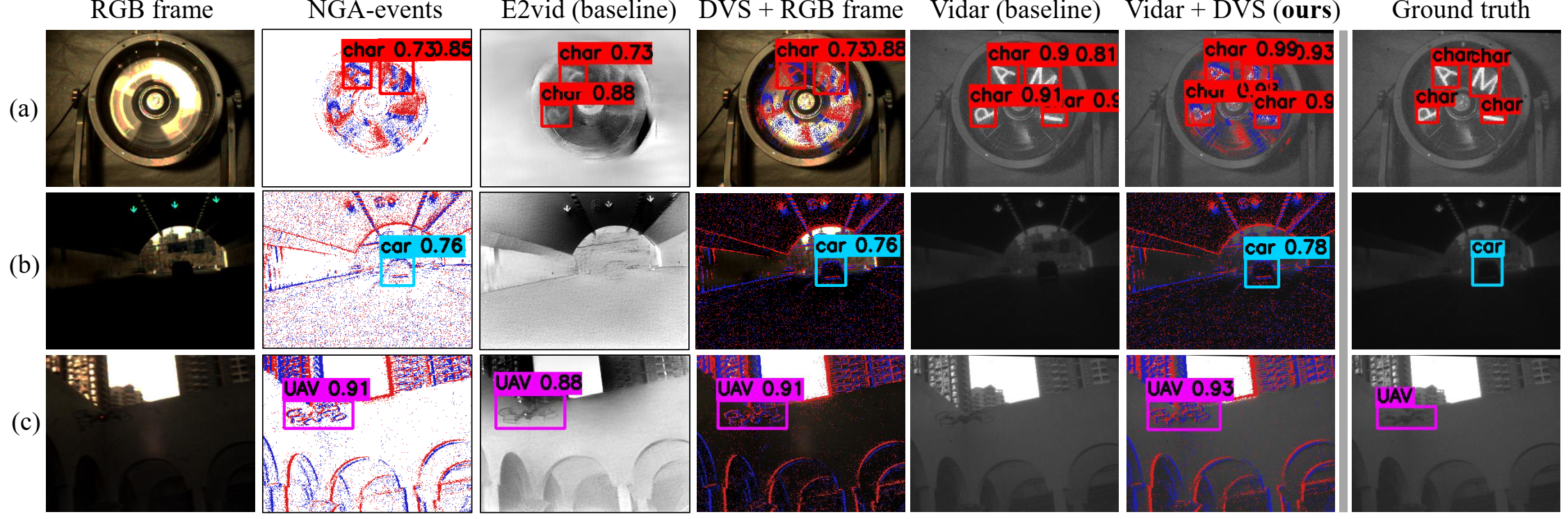
多模态异步数据:结合Vidar的静态纹理信息和DVS的动态响应特性,提供互补的视觉信息。
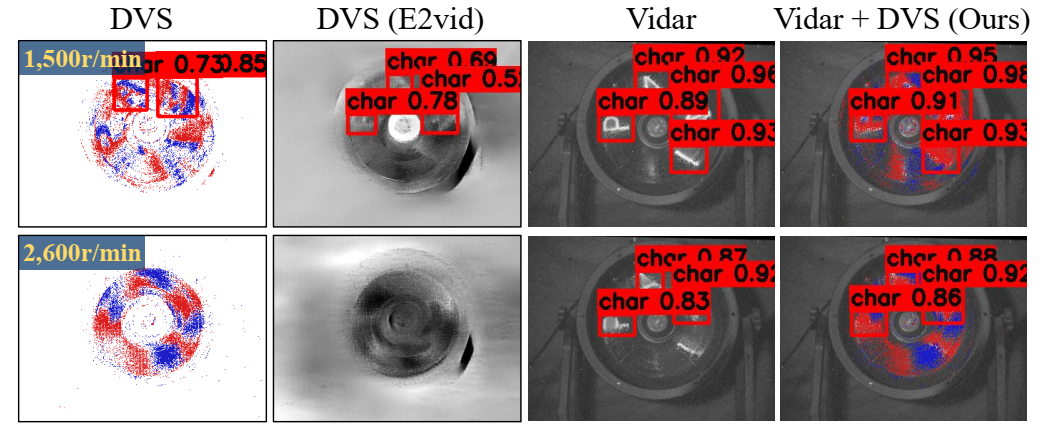
高时空分辨率:Vidar提供高频纹理信息,DVS提供微秒级时间分辨率,适应高速运动物体检测。
挑战性场景覆盖:包含高速运动(如1500r/min旋转字符)、低光照环境(隧道、夜间)和动态范围冲突场景。
数据格式和目录结构
- DVS数据:事件流格式,包含x/y坐标、极性和时间戳
- Vidar数据:.dat文件格式,每个像素8位代表时间bin
- 标签数据:每行代表一帧标注,包含边界框坐标和类别ID
可支持的任务:
- 异步多模态目标检测:联合利用Vidar和DVS数据
- 高速运动物体检测:利用高时间分辨率捕捉快速移动目标
- 低光照环境感知:验证算法在极端光照条件下的性能
- 多模态融合算法开发:探索不同模态数据的有效融合方式
数据集链接:https://git.openi.org.cn/lijianing/PKU-Vidar-DVS/datasets