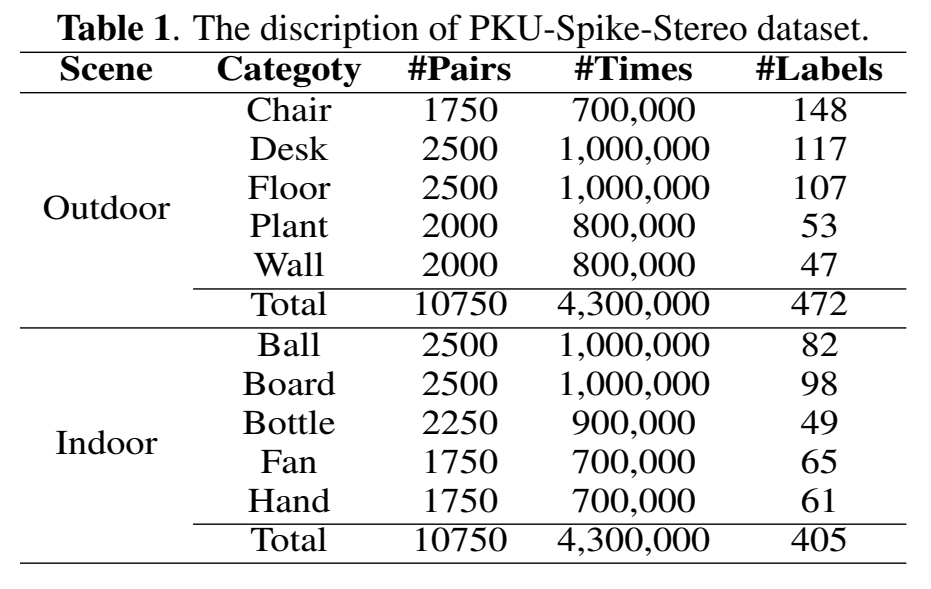
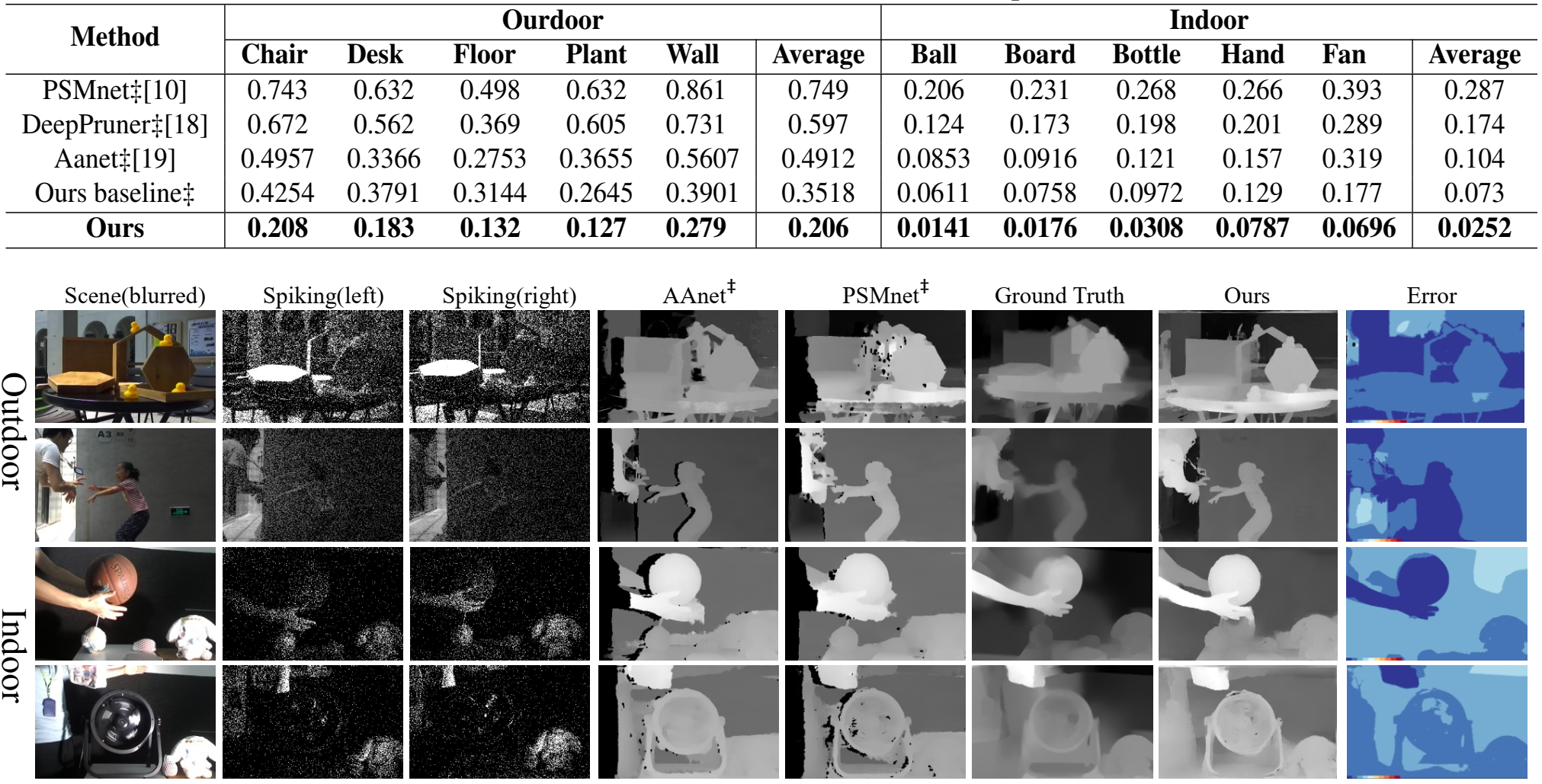
PKU-Spike-Stereo and Spike-KITTI
用途:为脉冲相机提供立体深度估计数据集,涵盖真实场景和模拟环境。
场景类别:PKU-Spike-Stereo包含室内和室外场景;Spike-KITTI基于KITTI数据集转换,保留道路场景特征。
数据格式:
- PKU-Spike-Stereo:双脉冲相机系统(400×250分辨率,20kHz采样率),与ZED深度相机(1280×720@30fps)同步
- Spike-KITTI:将经典KITTI数据集视频转换为脉冲流格式
- 数据规模:
- PKU-Spike-Stereo:10,750对脉冲流数据,877组高质量同步深度标签
- Spike-KITTI:200对立体图像(160训练/40测试)
数据集结构
PKU-Spike-Stereo数据集提供精确的时空对齐,通过专业图像配准实现脉冲流与深度图的精确同步,特别适合高速运动物体的深度估计。
可支持的任务:
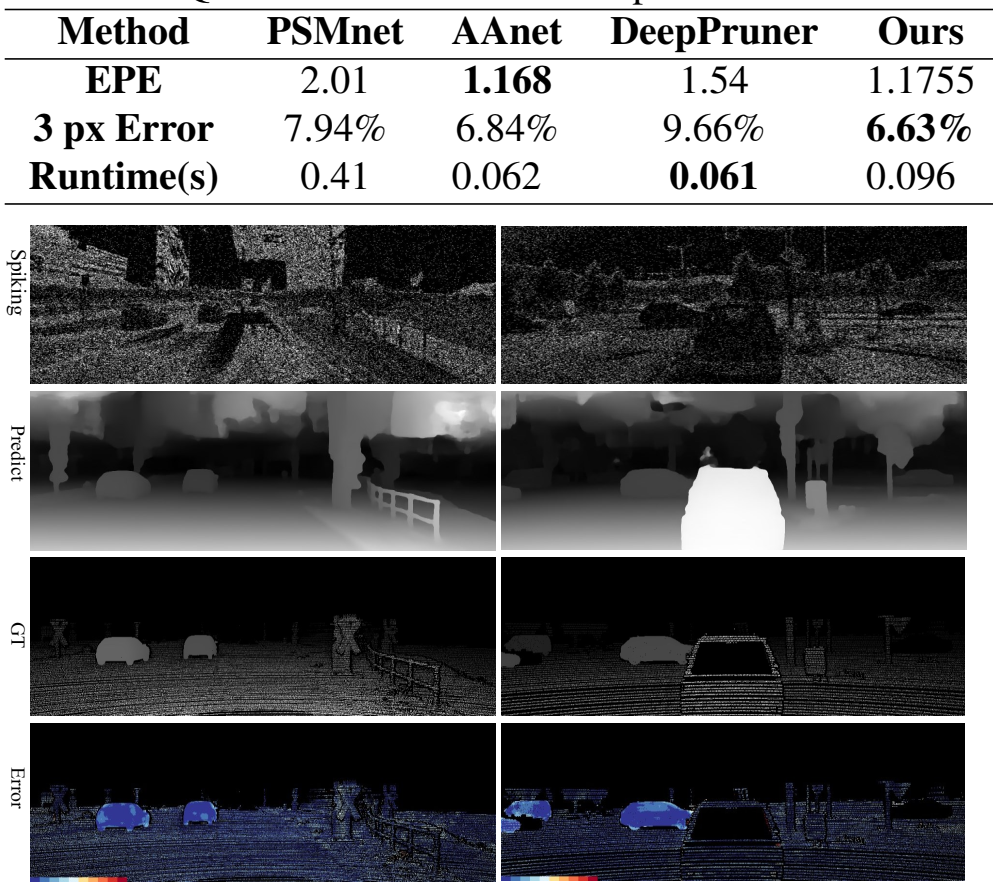
- 立体深度估计:利用双脉冲相机系统进行深度计算
- 跨模态融合:结合脉冲流与传统相机数据提高深度估计精度
- 高速运动深度估计:克服传统相机在高速场景下的运动模糊问题
关键特性
- 精确的时空对齐:脉冲流与深度图的高精度同步
- 丰富的场景类型:室内/室外多种场景覆盖
- 大样本量:提供充足的训练和测试数据
- 高速运动优化:特别适合快速移动物体的深度估计
数据集链接:尚未公开,文章链接为 https://www.jdl.link/doc/2011/20221228_Learning_Stereo_Depth_Estimation_with_Bio-Inspired_Spike_Cameras.pdf